



Introduction to Self Driving Cars
Last Updated on January 27, 2022 by Editorial Team
Author(s): Mugunthan
Originally published on Towards AI the World’s Leading AI and Technology News and Media Company. If you are building an AI-related product or service, we invite you to consider becoming an AI sponsor. At Towards AI, we help scale AI and technology startups. Let us help you unleash your technology to the masses.
Self-driving Cars
Self Driving Cars also called autonomous cars, are capable of driving with little or no input from the driver. It is one of the long dreams of people to see a fully autonomous vehicle in action. Lately, due to the advancement in the field of Artificial Intelligence and computational resources “Self-driving car” becoming one of the buzzwords in the technological world.
Many automobile companies like BMW, Bosch, and tech giants like waymo(previously Google’s self-driving car project), Tesla, NVIDIA, Qualcomm started investing in Self-driving cars.
So, why this hype? Why self-driving cars are needed?
It is evident from the daily accidents and deaths, most of the time they are caused by human errors. As a machine, self-driving cars are less capable of committing errors thus reducing accidents.
And another reason, I see is the comfortable and cozy lifestyle. Imagine after heavy work at the office, your car takes you home while you rest in the car. Nice right!
As a famous proverb says “Rome can’t be built in a day”, a self-driving car cannot be developed like that in a given time. For many years now automobile manufacturers trying to improve the driving and safety of the people traveling like,
- Adaptive cruise control
- Driving monitoring
- Advanced Driver Assistant systems
- Lane detection
- Object detection and proximity alert system
- speed adjustments and control
These are some of the systems that are already in place and help drivers to enhance the driving experience. These systems will now become sub-modules of completely self-driving cars. The autonomous capacity of a vehicle is determined by systems embedded in the vehicle/car and fallback features in place if any failure occurs. Based on which the Society of Automotive Engineers(SAE) defined 6 different levels of autonomous vehicles.
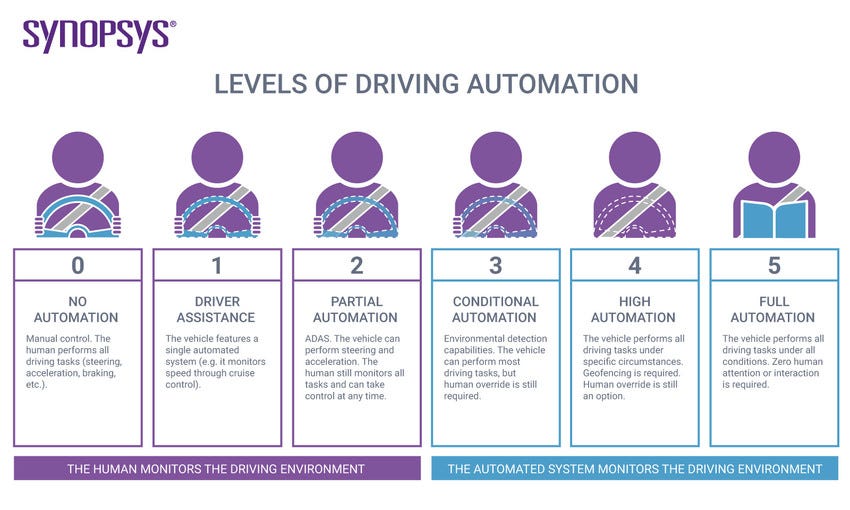
Lower levels such as 0,1,2 will require human monitoring and driving. In level 3 vehicles can do some of the tasks on their own but still require human intervention in critical situations. While levels 4 and 5 are autonomous, level 4 is provided with optional manual control for drivers to take over in critical situations. For a detailed read on the levels of the autonomous vehicle visit my earlier blog here.
Modules/systems of self-driving car
primarily there are three systems that help self-driving cars move around in the environment. They are,
- perception
- planning
- control
Perception:
This system is responsible for environment perception ie. being aware of the environment. As the data from the single sensor or single type of sensor is not reliable, this system contains multiple sensors like camera, lidar, radar, sonar, etc. Camera, Lidar, and Radar are the most widely used sensors in self-driving cars.
Fun Fact: some companies like waymo started to use microphone as ear of self-driving car to hear sounds from vehicles.
Camera
The camera is the eye of the self-driving car, similar to the eye of a human driver, and has a major role in understanding the environment. Using object detection and segmentation algorithms camera data is used to detect obstacle-less paths for the car. The camera is a passive sensor which means it only captures the light from the environment and not vice-versa. This makes it difficult for a camera to perform with the same efficiency during night or darkness as it performs in daylight. A stereo camera is the one suited for a self-driving car which can give some insights on distance and 3D view of the environment than a mono camera.
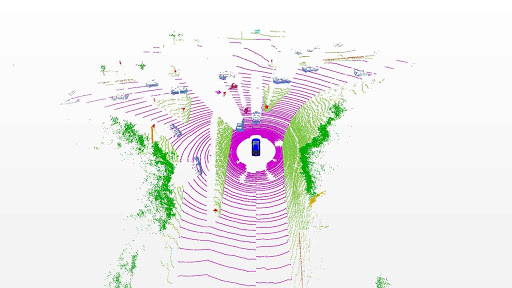
Radar
Radar has been used for a while now for a wide range of applications. It helps in the three-dimensional view of the environment with the 3d point cloud. It is an active sensor that means it sends out light and captures them on its return, based on which the calculations are made.
Since the Lidar is an active sensor and wavelength is near to the visible spectrum it has lots of interference with daylight and reduces the performance. And it also has its own measures for the intensity of the emitted light to avoid causing damage to human eyes.
And finally, there is a lot of debate on the usage of the Lidar sensor in autonomous vehicles due to its size and price. while companies like waymo rely hugely on lidar data even started building their own lidar sensors companies like tesla believe the autonomous vehicle is possible even without Lidar sensors.
Details of the further modules can be discussed in upcoming blogs
Introduction to Self Driving Cars was originally published in Towards AI on Medium, where people are continuing the conversation by highlighting and responding to this story.
Join thousands of data leaders on the AI newsletter. It’s free, we don’t spam, and we never share your email address. Keep up to date with the latest work in AI. From research to projects and ideas. If you are building an AI startup, an AI-related product, or a service, we invite you to consider becoming a sponsor.
Published via Towards AI
Towards AI Academy
We Build Enterprise-Grade AI. We'll Teach You to Master It Too.
15 engineers. 100,000+ students. Towards AI Academy teaches what actually survives production.
Start free — no commitment:
→ 6-Day Agentic AI Engineering Email Guide — one practical lesson per day
→ Agents Architecture Cheatsheet — 3 years of architecture decisions in 6 pages
Our courses:
→ AI Engineering Certification — 90+ lessons from project selection to deployed product. The most comprehensive practical LLM course out there.
→ Agent Engineering Course — Hands on with production agent architectures, memory, routing, and eval frameworks — built from real enterprise engagements.
→ AI for Work — Understand, evaluate, and apply AI for complex work tasks.
Note: Article content contains the views of the contributing authors and not Towards AI.
Related posts
Recent Posts


")



